From Noise to Numbers: A Hands-On Guide to Generating MNIST Digits with Diffusion Models (Part 1)

Introduction
Ever been amazed by AI-generated images? Let’s demystify the magic behind them! Have you ever wondered how a machine can generate something coherent from pure randomness? Take a look at the image below. On the left, you see a jumble of random pixels — digital noise. On the right, a crisp, recognizable MNIST digit emerges. This transformation from noise to structure is powered by Diffusion Models, a revolutionary approach in deep learning.

But how does this noise-to-image process actually work? Imagine an old analog TV with no signal. The screen fills with static — random noise. Diffusion models learn to reverse this process, starting from pure noise and gradually refining it into a meaningful image. Think of it as a sophisticated un-blurring process. If you had an extremely blurry image of a digit, a diffusion model would learn to iteratively “de-blur” it, bringing the digit into sharp focus — step by step — until the final image is clear.
MNIST digits provide the perfect playground for exploring this concept. Their simplicity allows us to focus on the core mechanics of diffusion without the added complexity of full-color, high-resolution images. In this post, we’ll take a hands-on approach, building our own MNIST digit generator from scratch to truly understand how diffusion models work.
What to Expect
We’ll break down diffusion models into four key stages, each progressively refining our approach:
- Baseline Model: We’ll start with a simple Convolutional UNet trained to directly generate MNIST digits. This serves as our foundation before diving into diffusion.
- Architecture Improvements: Next, we’ll enhance our UNet using a more advanced design from the diffusers library, seeing firsthand how architectural tweaks improve results.
- Introducing Diffusion: Now comes the core idea — rather than predicting full images, we train our model to predict noise, the crucial step that enables real diffusion.
- Full Diffusion Process: Finally, we’ll integrate a noise scheduler, allowing our model to iteratively denoise images, unlocking the true power of diffusion models.
By the end of this journey, you’ll not only understand how diffusion models generate images but also build one yourself! Whether you’re a deep-learning enthusiast or an AI researcher, this hands-on approach will give you both intuitive understanding and practical experience in one of the most exciting areas of machine learning today.
Ready to dive in? Let’s get started!
Credits
This post is inspired by the Hugging Face Diffusion Course
Environment Details
You can access and run this Jupyter Notebook from the GitHub repository on this link 2025-02-10-diffusion-model-mnist-part1.ipynb
Run the following cell to install the required packages.
- This notebook can be run with Google Colab T4 GPU runtime.
- I have also tested this notebook with AWS SageMaker Jupyter Notebook running on instance “ml.g5.xlarge” and image “SageMaker Distribution 2.3.0”.
WaterMark is an IPython magic extension for printing date and time stamps, version numbers, and hardware information. Let’s load this extension and print the environment details.
Python implementation: CPython
Python version : 3.11.11
IPython version : 7.34.0
torch : 2.5.1+cu124
torchvision: 0.20.1+cu124
datasets : 3.2.0
diffusers : 0.32.2
matplotlib : 3.10.0
watermark : 2.5.0
torchinfo : 1.8.0
Compiler : GCC 11.4.0
OS : Linux
Release : 6.1.85+
Machine : x86_64
Processor : x86_64
CPU cores : 2
Architecture: 64bit
Data Preparation for MNIST: Simple Digits, Simple Setup
Before training our diffusion model to generate MNIST digits, we first need to prepare the dataset properly. Data preparation is a critical step in any machine learning project, especially for image-based models. Think of it like setting up an artist’s workspace — before painting, an artist ensures that they have the right canvas and paints. Similarly, our model needs well-structured, consistently formatted, and properly scaled data to learn effectively and generate high-quality results.
In this section, we’ll go through the key steps required to get our MNIST digits ready for diffusion modeling.
Loading the MNIST Dataset
Loading the MNIST dataset is incredibly easy, thanks to the Hugging Face datasets library. With just one line of code, we can download and load the dataset:
/usr/local/lib/python3.11/dist-packages/huggingface_hub/utils/_auth.py:94: UserWarning:
The secret `HF_TOKEN` does not exist in your Colab secrets.
To authenticate with the Hugging Face Hub, create a token in your settings tab (https://huggingface.co/settings/tokens), set it as secret in your Google Colab and restart your session.
You will be able to reuse this secret in all of your notebooks.
Please note that authentication is recommended but still optional to access public models or datasets.
warnings.warn(DatasetDict({
train: Dataset({
features: ['image', 'label'],
num_rows: 60000
})
test: Dataset({
features: ['image', 'label'],
num_rows: 10000
})
})Here’s what happens under the hood:
- The
load_dataset("mnist")function from thedatasetslibrary automatically downloads the MNIST dataset (if not already cached) and prepares it for use.
- Running
print(dataset)reveals that it is stored as aDatasetDictwith two splits:'train'and'test'. Each split contains aDatasetobject with'image'and'label'features.
- Although the dataset includes labels, we will not use them for our unconditional image generation task.
- The images are in grayscale with pixel values ranging from 0 to 255.
Let’s display a sample image from the training dataset.
from IPython.display import display
# Extract a sample image from the dataset
sample_image = dataset["train"]["image"][0]
# Print details about the image
print("Data Type:", type(sample_image)) # Shows the type of object
print("Image Size:", sample_image.size) # Displays dimensions of the image
# Display the image
display(sample_image)Data Type: <class 'PIL.PngImagePlugin.PngImageFile'>
Image Size: (28, 28)
From the last cell output, you can see the loaded images are object of Python Image Library (PIL) and are very tiny in their actual size. Let’s enlarge the sample image and view it up close.
import matplotlib.pyplot as plt
# Display the image with a larger size
plt.figure(figsize=(5, 5)) # Adjust the figure size as needed
plt.imshow(sample_image, cmap="gray") # Use "gray" colormap for MNIST images
plt.axis("off") # Hide axis for better visibility
plt.show()
Each image is made up of small square pixels, with values ranging from 0 (black) to 255 (white). The grayscale intensity of each pixel determines how bright or dark it appears. By displaying these pixel values, we can understand how the model sees the image.
import numpy as np
# Convert image to NumPy array
image_array = np.array(sample_image)
# Print the pixel values in a structured format
for row in image_array:
print(" ".join(f"{pixel:3}" for pixel in row)) # Align values properly 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 3 18 18 18 126 136 175 26 166 255 247 127 0 0 0 0
0 0 0 0 0 0 0 0 30 36 94 154 170 253 253 253 253 253 225 172 253 242 195 64 0 0 0 0
0 0 0 0 0 0 0 49 238 253 253 253 253 253 253 253 253 251 93 82 82 56 39 0 0 0 0 0
0 0 0 0 0 0 0 18 219 253 253 253 253 253 198 182 247 241 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 80 156 107 253 253 205 11 0 43 154 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 14 1 154 253 90 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 139 253 190 2 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 11 190 253 70 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 35 241 225 160 108 1 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 81 240 253 253 119 25 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 45 186 253 253 150 27 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 16 93 252 253 187 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 249 253 249 64 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 46 130 183 253 253 207 2 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 39 148 229 253 253 253 250 182 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 24 114 221 253 253 253 253 201 78 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 23 66 213 253 253 253 253 198 81 2 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 18 171 219 253 253 253 253 195 80 9 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 55 172 226 253 253 253 253 244 133 11 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 136 253 253 253 212 135 132 16 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0Preprocessing for MNIST Images
Once the MNIST dataset is loaded, the next crucial step is preprocessing the images. Raw MNIST images, which are grayscale and 28×28 in size, need to be formatted appropriately for deep learning models. Proper preprocessing helps standardize the input data, making it easier for the model to learn effectively.
In this pipeline, we will use torchvision.transforms.Compose to apply a series of transformations:
- Resizing: Ensures all images are a consistent size (e.g., 32×32).
- Tensor Conversion: Converts images to PyTorch tensors and scales pixel values to [0,1].
Below is the code for our preprocessing pipeline:
import torch
from torchvision import transforms
image_size = 32 # Define the target image size (e.g., 32x32)
preprocess = transforms.Compose([
transforms.Resize((image_size, image_size)), # Resize images to a fixed size
transforms.ToTensor(), # Convert images to tensors & scale pixel values to [0, 1]
])Each function in transforms.Compose() plays a crucial role in preparing the images:
transforms.Resize((image_size, image_size))- Resizes images to 32×32 pixels (or any chosen
image_size).
- Ensures a consistent input size for our UNet model.
- Resizes images to 32×32 pixels (or any chosen
transforms.ToTensor()- Converts images from PIL format to PyTorch tensors.
- Scales pixel values from [0, 255] to [0, 1] for compatibility with deep learning models.
- Converts images from PIL format to PyTorch tensors.
Applying the Transformations to the Dataset
With our preprocessing pipeline defined, we now need to apply it to the dataset. Instead of modifying the dataset in advance, we’ll use on-the-fly transformations — ensuring preprocessing is applied only when data is accessed, keeping memory usage efficient.
To achieve this, we define a transformation function and set it for our dataset:
In this code:
- The
transformfunction- Receives batches of examples from the dataset.
- Applies the
preprocesspipeline (resizing, tensor conversion) to the'image'feature using list comprehension.
- Returns a dictionary with the transformed images under the key
'images'.
- Receives batches of examples from the dataset.
dataset.set_transform(transform)- Associates the
transformfunction with the dataset.
- Ensures that preprocessing is dynamically applied whenever data is accessed, rather than modifying and storing a preprocessed copy.
- Associates the
Creating the DataLoader
With our dataset ready, the next step is to create a DataLoader. PyTorch’s DataLoader is an essential utility that efficiently handles data loading during training. It performs key tasks such as:
- Batching: Groups images into batches for efficient processing, especially when using a GPU.
- Shuffling: Randomizes the order of samples to prevent the model from memorizing patterns based on dataset order.
- Efficient Loading: Streams data dynamically, preventing memory bottlenecks.
Shuffling is particularly important as it enhances the model’s generalization ability, ensuring it learns meaningful patterns rather than sequence-based biases.
Here’s how to create a DataLoader for the MNIST training set:
import torch
from torch.utils.data import DataLoader
batch_size = 8 # Define batch size (adjust as needed based on GPU memory)
# Using a small batch size for easier visual validation of images.
# When training, we will use a larger batch size for efficiency.
train_dataloader = DataLoader(dataset["train"], batch_size=batch_size, shuffle=True)In this code snippet:
batch_size = 8: Defines the number of images in each batch. Larger batch sizes can speed up training but require more memory.
dataset["train"]: Specifies the training split of the MNIST dataset.
shuffle=True: Ensures that data is randomly shuffled at the beginning of each training epoch, preventing the model from learning sequence-based biases.
With train_dataloader set up, we are now fully equipped to feed batches of preprocessed MNIST images into our diffusion model during training.
Visualizing a Batch of Preprocessed Images
Before training a model, it’s important to verify that our data preprocessing pipeline is functioning as expected. One effective way to do this is by visualizing a batch of preprocessed images. This allows us to check whether key transformations — such as resizing and tensor conversion — have been applied correctly.
We can use matplotlib along with torchvision.utils.make_grid to display a grid of images from our train_dataloader. This quick visual inspection helps confirm that the images are correctly formatted and ready for model training.
Below is a simple implementation to visualize a batch:
import torchvision
# Get a batch of images from the dataloader
data_iter = iter(train_dataloader)
batch = next(data_iter) # Get the first batch
imgs = batch["images"] # Get images from the batch
print("Input shape:", imgs.shape)
# Visualize the batch
plt.figure(figsize=(8, 8))
plt.axis("off")
plt.imshow(torchvision.utils.make_grid(imgs)[0], cmap="Greys")
plt.show()Input shape: torch.Size([8, 1, 32, 32])
In the previous plots, MNIST digits appeared as white pixels on a dark background, but in the last plot, they now appear as black pixels on a white background. This change is due to the colormap (cmap) setting used when plotting the images.
Both "gray" and "Greys" are sequential colormaps, but they interpret pixel intensity slightly differently:
"gray": Maps values close to 0 as black and higher values as white."Greys": Maps values close to 0 as white and higher values as black.
I switched the colormap to make the MNIST digits sharper and easier to validate visually. You can learn more about Matplotlib colormaps from the official documentation.
Our images have been transformed from pixel-based representations to tensors, making them more suitable for training. Now, let’s visualize how a single image appears after these transformations.
# Take the first image from the batch
image_tensor = next(iter(train_dataloader))["images"][0]
# Convert tensor to NumPy array
image_array = image_tensor.numpy()
# Convert from (C, H, W) to (H, W) since it's grayscale
image_array = image_array.squeeze(0)
# Print pixel values
print("Pixel values after preprocessing:")
for row in image_array:
print(" ".join(f"{pixel:.1f}" for pixel in row))
# Display the image for reference
plt.figure(figsize=(6,6))
plt.imshow(image_array, cmap="gray", interpolation="nearest")
plt.title("Processed Image")
plt.axis("off")
plt.show()Pixel values after preprocessing:
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.2 0.4 0.5 0.3 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.5 0.9 0.9 0.6 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.3 0.8 0.9 0.8 0.5 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.6 0.9 0.9 0.5 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.1 0.8 0.9 0.8 0.4 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.1 0.7 1.0 0.6 0.2 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.1 0.5 0.9 0.8 0.4 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.1 0.4 0.9 0.9 0.4 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.2 0.5 0.8 0.8 0.4 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.4 0.8 0.9 0.5 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.1 0.6 0.9 0.7 0.3 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.2 0.7 0.9 0.6 0.0 0.0 0.0 0.0 0.0 0.1 0.1 0.2 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.1 0.6 0.9 0.5 0.0 0.0 0.0 0.0 0.1 0.3 0.7 0.9 0.7 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.6 0.9 0.7 0.3 0.0 0.0 0.0 0.4 0.8 0.9 1.0 1.0 0.9 0.5 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.6 1.0 0.7 0.2 0.0 0.0 0.3 0.8 1.0 1.0 1.0 1.0 1.0 0.8 0.3 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.6 1.0 0.8 0.3 0.1 0.4 0.8 1.0 1.0 0.7 0.6 0.7 1.0 0.9 0.4 0.1 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.2 0.7 1.0 0.9 0.7 0.6 0.8 1.0 0.8 0.5 0.3 0.4 0.7 1.0 0.9 0.2 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.2 0.6 0.9 1.0 1.0 0.9 1.0 1.0 0.8 0.5 0.5 0.6 0.9 1.0 0.8 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.3 0.6 0.9 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 0.8 0.5 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.2 0.6 1.0 1.0 0.9 0.8 0.9 0.9 0.9 0.9 0.8 0.5 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.3 0.8 0.9 0.5 0.2 0.4 0.6 0.7 0.7 0.5 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.3 0.7 0.8 0.2 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.2 0.6 0.8 0.2 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.1 0.2 0.3 0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
Understanding the Noise Corruption Function
Introducing the corrupt Function
In diffusion models, we need a systematic way to introduce noise into clean images. This controlled noise addition is crucial for simulating the forward diffusion process, where an image gradually transforms from a structured state to pure noise. To achieve this, we use a helper function called corrupt.
The corrupt function takes a batch of clean images and progressively degrades them by blending in random noise at varying levels, determined by an amount parameter. This function plays a fundamental role in diffusion models, enabling a structured transition from the original image to noise. While our initial implementation will use a simplified version, understanding its mechanics is essential, as more advanced models will build upon this process.
Now, let’s examine its implementation:
The function corrupt(x, noise, amount) takes three input arguments:
x: A batch of clean images, represented as a PyTorch tensor with shape(batch_size, 1, image_size, image_size).
noise: A tensor of random values, matching the shape ofx, representing the noise to be added.
amount: A tensor of shape(batch_size,), specifying the level of noise corruption for each image in the batch.
Since amount is a 1D tensor, it must be reshaped to match the dimensions of x for proper broadcasting during element-wise operations. This is achieved with:
amount = amount.view(-1, 1, 1, 1)This transformation ensures that amount is applied consistently across all pixels and channels of each image.
The core logic of noise corruption is in the return statement:
return x * (1 - amount) + noise * amountThis expression performs a smooth interpolation between the original image x and the noise noise, controlled by amount:
(1 - amount): Asamountincreases from0to1, this value decreases from1to0.
x * (1 - amount): The clean image is scaled down based on(1 - amount).- If
amountis near0, the image remains mostly intact. - If
amountis near1, its contribution diminishes significantly.
- If
noise * amount: The noise is scaled up in proportion toamount.- At
amount = 0, no noise is added - At
amount = 1, the image is entirely replaced by noise.
- At
- The sum of these terms creates a seamless blend, where the noise level increases progressively with
amount.
By structuring the noise corruption process this way, we ensure that images degrade in a controlled and predictable manner — an essential property for training diffusion models.
To better understand how the corrupt function modifies images, we will apply it to a batch of MNIST digits with varying levels of noise and visualize the results. The code below retrieves a batch of images from train_dataloader, generates a range of noise levels, applies the corrupt function, and then displays both the clean and noisy images.
# --- Visualizing the effect of the corrupt function ---
# Get a batch of images from the training dataloader
batch = next(iter(train_dataloader))
imgs = batch["images"]
# Prepare noise and noise amounts for visualization
amount = torch.linspace(0, 1, imgs.shape[0]) # Noise amounts from 0 to 1
noise = torch.rand_like(imgs) # Random noise tensor
noised_x = corrupt(imgs, noise, amount) # Apply corrupt function
# --- Plotting the input and corrupted images ---
fig, axs = plt.subplots(2, 1, figsize=(12, 5)) # Create figure and axes for plotting
# Plotting the original input data
axs[0].set_title("Input data")
axs[0].imshow(torchvision.utils.make_grid(imgs)[0], cmap="Greys") # Display original images in top row
# Plotting the corrupted version
axs[1].set_title("Corrupted data, from little corruption to a lot of corrupton")
axs[1].imshow(torchvision.utils.make_grid(noised_x)[0], cmap="Greys") # Display corrupted images in bottom row
plt.show() # Show the plot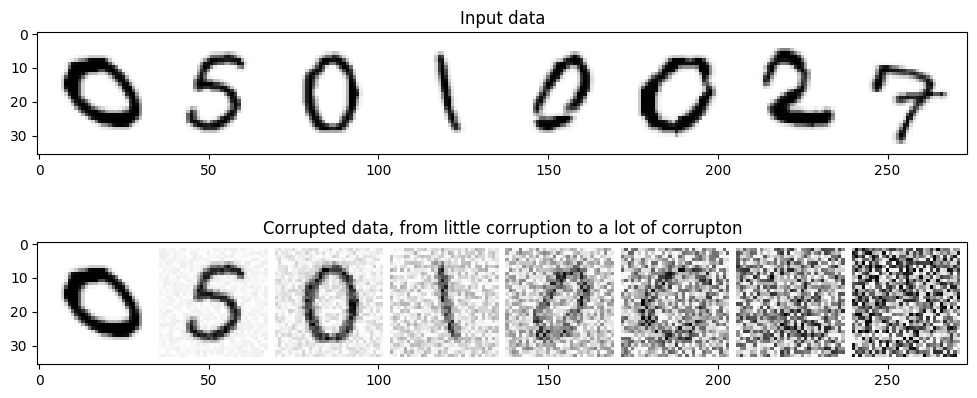
Running this code generates a visualization consisting of two rows of MNIST digits:
- Top row (Input data) – This row displays the original, clean MNIST digits from
train_dataloader. These digits are sharp and clearly recognizable. This serves as our reference point before noise is applied.
- Bottom row (Corrupted data, from little corruption to a lot of corruption) – This row shows the same digits after being processed by the
corruptfunction. Observing from left to right, we can see an increasing level of noise corruption.
- Leftmost images: The noise level is minimal, so these images closely resemble the originals in the top row.
- Gradual progression: Moving toward the right, noise becomes more prominent, making the digits less distinct.
- Rightmost images: The noise level is at its maximum, significantly obscuring the original digit. In extreme cases, the digit may become unrecognizable.
This visualization clearly illustrates the behavior of the corrupt function. By adjusting the amount parameter, we can precisely control the degree of noise added to an image — ranging from slight perturbations to near-complete corruption. This capability will be crucial in our exploration of diffusion models, where controlled noise application is fundamental to the learning process.
Model 1: Simple Convolutional UNet for Direct Image Prediction
Why Use UNets for Diffusion?
Before building our first model, the Simple Convolutional UNet, let’s first understand why this architecture is essential for diffusion models.
In the context of diffusion models, “diffusion” refers to a process inspired by natural phenomena — like how a drop of ink disperses in water until it is evenly distributed. In machine learning, this concept is mimicked by gradually adding noise to an image until it turns into pure random noise, similar to TV static. This is known as the forward diffusion process. The goal, however, is to reverse this process — step by step removing the noise to recover a meaningful image. This is the reverse diffusion process, and the neural network responsible for this denoising task is often a UNet.
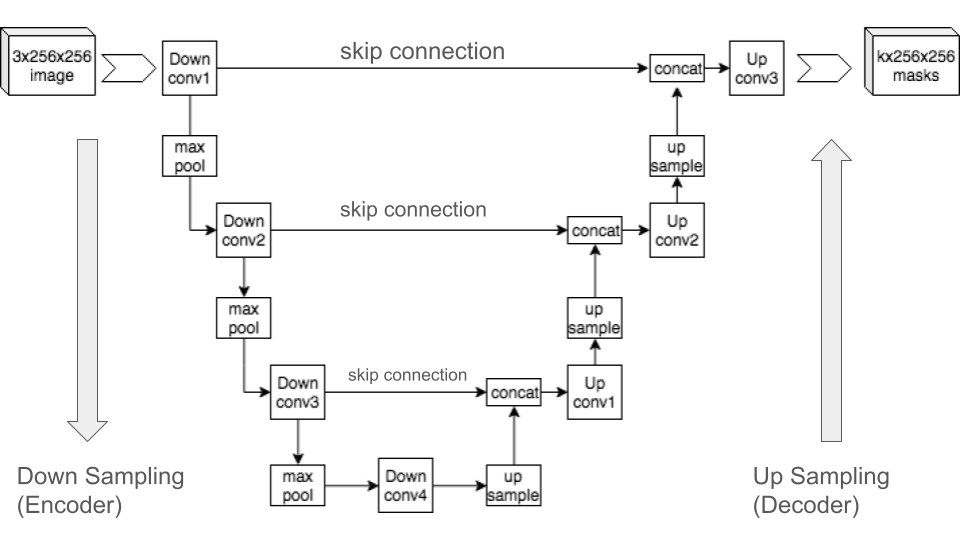
UNets are widely used for this purpose because they excel at image-to-image tasks, particularly restoring details from noisy images. Their U-shaped architecture consists of two key parts:
- The downsampling path (encoder): This progressively reduces the image size while extracting important features.
- The upsampling path (decoder): This reconstructs the image while preserving fine details.
A crucial component of UNets is skip connections, which transfer detailed features from the encoder directly to corresponding layers in the decoder. These connections help the network retain high-frequency information, such as edges and textures, which are often lost during downsampling.
While other architectures could be used, UNets have consistently proven to be highly effective at reversing the diffusion process and generating high-quality images.
Interestingly, UNets were not originally developed for diffusion models or image generation. They were first introduced for medical image segmentation, where precise localization of structures (such as tumors in MRI scans) is critical. Their success in medical imaging, which requires balancing contextual understanding and fine-detail preservation, makes them an excellent choice for denoising in diffusion models.
In our first model, Model 1, we will use a simplified UNet for direct image prediction — a stepping stone toward more advanced diffusion models.
Our Direct Image Prediction Approach
To ease into the concepts behind diffusion models, Model 1 takes a simplified approach: direct image prediction. Instead of fully implementing a diffusion model that gradually removes noise in multiple steps, we will train a Convolutional UNet to denoise an image in a single forward pass.
It’s important to note that this is not a true diffusion model. Unlike traditional diffusion models, which iteratively refine an image by predicting noise at each step, this UNet directly predicts the clean version of a noisy MNIST digit in one go.
Why start with this approach?
- It simplifies the learning process. By focusing solely on the UNet’s architecture and training, we can avoid the complexities of diffusion schedulers and iterative sampling.
- It establishes a useful baseline. This basic denoising UNet allows us to compare performance as we transition to more sophisticated, iterative diffusion models.
When discussing U-Net architectures, we often assume they are convolution-based. But are there U-Net variants that don’t use convolutional layers at all?
Yes, there are. Below are some alternatives that replace convolutions with different computational approaches.
1. Fourier Neural Operator U-Net (FNO-U-Net)
This model replaces the usual convolutional layers with Fourier Transforms. Instead of learning patterns using small local filters (like in a CNN), it transforms the image into the frequency domain, where patterns can be processed more efficiently.
2. Siren U-Net
Instead of using convolutions, this model relies on Sinusoidal Representation Networks (SIREN), which use sine functions as activation functions. This allows the network to smoothly model continuous signals.
3. MLP-Mixer U-Net
This model replaces convolutions with fully connected layers that process information across the entire image. Instead of scanning with filters, it mixes and reshapes the image data in two main steps:
- First step: Processes information across different image locations (spatial mixing).
- Second step: Processes information across different color or feature channels (channel mixing).
- This ensures that both local and global information is captured.
Building a Simple Convolutional UNet
Now, let’s construct a minimal yet functional UNet that serves as the core of our direct image prediction approach.
Network Architecture
Our Convolutional UNet, implemented as the BasicUNet class, follows the standard U-shape design, consisting of:
- A contracting path (encoder): This reduces spatial dimensions while capturing important features through a series of convolutional layers and downsampling operations.
- An expanding path (decoder): This restores the original image size using convolutional layers and upsampling, reconstructing the denoised image.
- Skip connections: These directly pass feature information from the encoder to the decoder, preserving fine details during the upsampling process.
Here’s the PyTorch code for our BasicUNet class, implementing the simple convolutional UNet architecture we just described:
from torch import nn
class BasicUNet(nn.Module):
"""A minimal UNet implementation."""
def __init__(self, in_channels=1, out_channels=1):
super().__init__()
self.down_layers = nn.ModuleList(
[
nn.Conv2d(in_channels, 32, kernel_size=5, padding=2),
nn.Conv2d(32, 64, kernel_size=5, padding=2),
nn.Conv2d(64, 64, kernel_size=5, padding=2),
]
)
self.up_layers = nn.ModuleList(
[
nn.Conv2d(64, 64, kernel_size=5, padding=2),
nn.Conv2d(64, 32, kernel_size=5, padding=2),
nn.Conv2d(32, out_channels, kernel_size=5, padding=2),
]
)
# Use the SiLU activation function, which has been shown to work well
# due to different properties (smoothness, non-monotonicity, etc.).
self.act = nn.SiLU()
self.downscale = nn.MaxPool2d(2)
self.upscale = nn.Upsample(scale_factor=2)
def forward(self, x):
h = []
for i, l in enumerate(self.down_layers):
x = self.act(l(x))
if i < 2: # For all but the third (final) down layer:
h.append(x) # Storing output for skip connection
x = self.downscale(x) # Downscale ready for the next layer
for i, l in enumerate(self.up_layers):
if i > 0: # For all except the first up layer
x = self.upscale(x) # Upscale
x += h.pop() # Fetching stored output (skip connection)
x = self.act(l(x))
return xfrom torchinfo import summary
# initialize the model
model = BasicUNet()
# print model info
print(model)
summary(model)BasicUNet(
(down_layers): ModuleList(
(0): Conv2d(1, 32, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(1): Conv2d(32, 64, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(2): Conv2d(64, 64, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
)
(up_layers): ModuleList(
(0): Conv2d(64, 64, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(1): Conv2d(64, 32, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
(2): Conv2d(32, 1, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2))
)
(act): SiLU()
(downscale): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(upscale): Upsample(scale_factor=2.0, mode='nearest')
)=================================================================
Layer (type:depth-idx) Param #
=================================================================
BasicUNet --
├─ModuleList: 1-1 --
│ └─Conv2d: 2-1 832
│ └─Conv2d: 2-2 51,264
│ └─Conv2d: 2-3 102,464
├─ModuleList: 1-2 --
│ └─Conv2d: 2-4 102,464
│ └─Conv2d: 2-5 51,232
│ └─Conv2d: 2-6 801
├─SiLU: 1-3 --
├─MaxPool2d: 1-4 --
├─Upsample: 1-5 --
=================================================================
Total params: 309,057
Trainable params: 309,057
Non-trainable params: 0
=================================================================Explaining the Simple Conv UNet Code
Let’s break down the BasicUNet code step-by-step to understand its inner workings.
We begin by defining our UNet as a Python class in PyTorch: class BasicUNet(nn.Module):. This line creates a class named BasicUNet that inherits from nn.Module. In PyTorch, nn.Module is the foundational building block for all neural networks. By inheriting from it, BasicUNet gains essential neural network capabilities.
Inside the BasicUNet class, we find the constructor: def __init__(self, in_channels=1, out_channels=1):. This special method, __init__, is executed when you create an instance of BasicUNet. The parameters in_channels=1 and out_channels=1 are set here. They specify that our UNet, by default, is designed to take single-channel grayscale images (like MNIST digits) as input and produce single-channel grayscale images as output.
Encoder Path
Next, we define the encoder or downsampling path: self.down_layers = nn.ModuleList([...]). self.down_layers is an nn.ModuleList, which acts like a Python list but specifically designed to hold PyTorch neural network layers. Within self.down_layers, we define a sequence of three nn.Conv2d (2D Convolutional) layers:
nn.Conv2d(in_channels, 32, kernel_size=5, padding=2): This is the first convolutional layer of the encoder.in_channels(initially 1 for grayscale images) defines the number of input channels this layer expects.32is the number of output channels or feature maps that this layer will generate.kernel_size=5sets the size of the convolutional filter to 5x5 pixels, andpadding=2adds padding around the input. This padding is used to maintain the spatial dimensions of the output feature map, ensuring it’s the same size as the input.nn.Conv2d(32, 64, kernel_size=5, padding=2): The second convolutional layer takes32input channels (the output from the previous layer) and outputs64channels, further increasing the network’s capacity to learn complex features.nn.Conv2d(64, 64, kernel_size=5, padding=2): The third convolutional layer takes64input channels and also outputs64channels. Notice how the number of feature channels increases in the encoder’s initial layers. This is a common strategy in convolutional networks, allowing them to capture increasingly abstract and complex features as they go deeper.
It’s important to understand that nn.Conv2d creates a 2D convolutional layer specifically for two-dimensional data, such as images. In this context, two dimensions refer to height and width, not the number of color channels.
All standard images—whether grayscale or RGB—are inherently 2D because they have a height and width. However, the number of channels (e.g., grayscale (1 channel), RGB (3 channels), or RGBA (4 channels)) should not be confused with the concept of dimensionality.
But why do we specifically call it a 2D convolutional layer? The reason is that convolutional layers can operate on different types of data:
- Conv1d (
nn.Conv1d) is used for 1D data, where the input has only one spatial dimension (e.g., time series, audio signals, or text embeddings).
- Conv2d (
nn.Conv2d) is for 2D data, where the input has height and width (e.g., grayscale or RGB images).
- Conv3d (
nn.Conv3d) is for 3D data, where the input has height, width, and depth (e.g., CT scans, MRIs, or video frames).
For example:
- Conv1d is commonly used for speech processing (e.g., analyzing waveforms).
- Conv2d is used for standard image processing (e.g., segmentation, classification).
- Conv3d is useful for volumetric data (e.g., 3D medical scans, motion analysis in videos).
Decoder Path
Similarly, we define the decoder or upsampling path: self.up_layers = nn.ModuleList([...]). self.up_layers, also an nn.ModuleList, holds the convolutional layers for the decoder. It contains three nn.Conv2d layers that, in terms of channel numbers, mirror the encoder in reverse. In the forward pass (explained later), these layers will be used in conjunction with upsampling to reconstruct the image:
nn.Conv2d(64, 64, kernel_size=5, padding=2): The first convolutional layer in the decoder path.nn.Conv2d(64, 32, kernel_size=5, padding=2): The second convolutional layer, reducing the number of feature channels back to 32.nn.Conv2d(32, out_channels, kernel_size=5, padding=2): The final convolutional layer of the decoder.out_channels(which is 1 by default) ensures that the UNet outputs a single-channel grayscale image, consistent with the input.
Activation Function
self.act = nn.SiLU(): This line defines self.act as the SiLU (Sigmoid Linear Unit) activation function. Activation functions are crucial for introducing non-linearity into neural networks, enabling them to learn complex, non-linear relationships in the data. The SiLU activation will be applied after each convolutional layer in the forward pass.
Down Sampling
self.downscale = nn.MaxPool2d(2): Here, self.downscale is defined as a MaxPool2d layer with a kernel size of 2. Max pooling is a downsampling technique. It reduces the spatial dimensions of feature maps by dividing the image into 2x2 blocks and keeping only the maximum value from each block. This effectively halves the height and width of the feature maps, reducing spatial size while retaining important features.
Up Sampling
self.upscale = nn.Upsample(scale_factor=2): This defines self.upscale as an Upsample layer with a scale_factor=2. Upsampling is the inverse of downsampling; it increases the spatial size of feature maps. In this case, it doubles the height and width using nearest-neighbor interpolation by default, effectively reversing the spatial reduction done by max pooling in the encoder.
Forward Pass
Finally, the forward(self, x): method defines the forward pass of the network – how input data x flows through the layers to produce an output.
h = []: We initialize an empty listh. This list will serve as storage for intermediate feature maps from the encoder path. These stored feature maps will be used later for skip connections in the decoder.The first
for i, l in enumerate(self.down_layers):loop iterates through the encoder’s convolutional layers (self.down_layers).x = self.act(l(x)): Inside the loop, for each convolutional layerl, we apply the layer to the current inputxand then pass the result through the SiLU activation function (self.act). The output becomes the newx.if i < 2: h.append(x); x = self.downscale(x): For the first two encoder layers (whereiis 0 or 1, meaning not for the last encoder layer), we perform two key actions:h.append(x): We store the outputxof the activated convolutional layer into our skip connection listh. These stored feature maps from the encoder will be added to the decoder path later, enabling skip connections.x = self.downscale(x): We apply theMaxPool2ddownsampling (self.downscale) to reduce the spatial dimensions ofx, preparing it to be processed by the next layer in the encoder path. Downsampling is not performed after the final encoder layer in this architecture.
The second
for i, l in enumerate(self.up_layers):loop iterates through the decoder’s convolutional layers (self.up_layers).if i > 0: x = self.upscale(x); x += h.pop(): For all decoder layers except the first one (i > 0), we perform the following:x = self.upscale(x): We upsample the feature mapxusingself.upscaleto increase its spatial size, reversing the downsampling from the encoder.x += h.pop(): We implement the skip connection here.h.pop()retrieves the last stored feature map from our skip connection listh. We then add this retrieved feature map to the upsampled feature mapx. This addition is the core of the skip connection, combining detailed features from the encoder with the upsampled features in the decoder to help preserve fine details during reconstruction.
x = self.act(l(x)): After the optional upsampling and skip connection (for layers after the first in the decoder), we apply the current decoder layerl(aConv2dlayer) and then the SiLU activation function (self.act).
return x: Finally, theforwardmethod returns the processed tensorx. This is the output of the UNet, representing the predicted denoised MNIST digit in our case.
Training the Model
Now that we have defined the BasicUNet architecture, the next step is to train it. We will follow a standard supervised learning approach to train the UNet to predict clean MNIST digits from noisy inputs. This involves defining a loss function, selecting an optimizer, and implementing a training loop.
Loss Function: Mean Squared Error (MSE)
For this direct image prediction task, we use the Mean Squared Error (MSE) loss, implemented in PyTorch as F.mse_loss (from torch.nn.functional). MSE measures the average squared difference between the predicted image (output from the UNet) and the ground-truth clean image. By minimizing this loss, the model learns to generate outputs that closely match the original digits, ensuring pixel-wise accuracy.
Optimizer: Adam
We use the Adam optimizer (torch.optim.Adam) with a learning rate of 1e-3 (0.001). Adam is a widely used optimizer that adapts the learning rate for each parameter, making training more stable and efficient. The learning rate determines how much the model’s weights are adjusted at each step—too high may lead to instability, while too low may slow down convergence.
Training Process
The model is trained for 5 epochs, iterating through batches of MNIST images using train_dataloader. Within each epoch, the training loop performs the following steps:
- Load a batch of clean MNIST images from
train_dataloaderand move them to the computing device (GPU or CPU). - Generate noisy images by adding random noise to the clean images. The noise level varies per image, controlled by a random
noise_amountscalar. - Feed the noisy images into the UNet, which predicts the corresponding denoised images.
- Compute the MSE loss, comparing the predicted images with the clean images.
- Perform backpropagation to compute gradients, indicating how each model parameter should be adjusted.
- Update the model’s weights using the Adam optimizer to minimize the loss.
- Store the loss value for tracking training progress.
This process repeats for 5 epochs, allowing the model to progressively improve its ability to denoise MNIST digits.
After training, we plot the loss curve to visualize how the MSE loss evolves over time.
from torch.nn import functional as F
from torch.optim import Adam
import matplotlib.pyplot as plt
# --- Check GPU Availability ---
device = "cuda" if torch.cuda.is_available() else "cpu" # Use GPU if available, else CPU
print("device: ", device)
# --- Hyperparameters and Setup ---
model = model.to(device) # Instantiate BasicUNet and move to device
optimizer = Adam(model.parameters(), lr=1e-3) # Initialize Adam optimizer
losses = [] # Store loss values
num_epochs = 5 # Number of training epochs
batch_size = 128 # Larger batch size for training
train_dataloader = torch.utils.data.DataLoader(
dataset["train"], batch_size=batch_size, shuffle=True
)device: cuda# --- Training Loop ---
for epoch in range(num_epochs):
for batch in train_dataloader: # Iterate over training batches
clean_images = batch["images"].to(device) # Load clean images
# Sample noise to add to the images
noise = torch.rand_like(clean_images).to(device)
# Sample amount of noise to add to the images
noise_amount = torch.randn(clean_images.shape[0]).to(device)
# Add noise to the clean images according to the noise magnitude
noisy_images = corrupt(clean_images, noise, noise_amount)
predicted_images = model(noisy_images) # Model predicts denoised images
loss = F.mse_loss(predicted_images, clean_images) # Compute MSE loss
optimizer.zero_grad() # Clear previous gradients
loss.backward() # Backpropagate
optimizer.step() # Update model weights
losses.append(loss.item()) # Store loss
# --- Print average loss per epoch ---
avg_loss = sum(losses[-len(train_dataloader):]) / len(train_dataloader)
print(f"Epoch {epoch+1}/{num_epochs} - Average Loss: {avg_loss:.4f}")Epoch 1/5 - Average Loss: 0.0173
Epoch 2/5 - Average Loss: 0.0105
Epoch 3/5 - Average Loss: 0.0098
Epoch 4/5 - Average Loss: 0.0093
Epoch 5/5 - Average Loss: 0.0088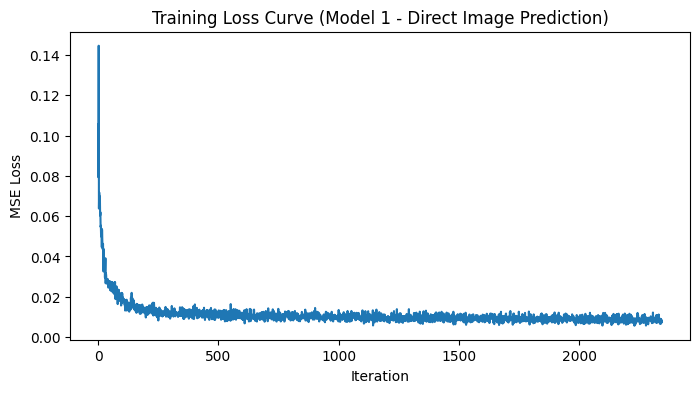
Inference with Model
Now that our model is trained, we need to evaluate its ability to denoise images it hasn’t encountered during training. This process, known as inference (or sometimes sampling or generation), involves using the trained model to generate outputs on new data.
For Model 1, inference is straightforward because it performs direct image prediction in a single forward pass. Given a noisy image as input, it directly outputs a denoised version.
To assess model’s denoising performance, we will use the MNIST test dataset. We’ll set up a DataLoader for the test set, similar to train_dataloader, but using dataset["test"] to load the test split. For each batch of test images, we will:
- Load a batch of clean MNIST test images from the
test_dataloader.
- Generate new noisy versions of these test images.
- It’s crucial to use fresh, randomly generated noise—distinct from what was used during training—to properly evaluate the model’s ability to generalize to unseen noisy inputs.
- We will apply the same
corruptfunction used during training.
- It’s crucial to use fresh, randomly generated noise—distinct from what was used during training—to properly evaluate the model’s ability to generalize to unseen noisy inputs.
- Feed the noisy test images into our trained
BasicUNetmodel.- The model will produce its predicted denoised images in a single forward pass.
- This is one-shot denoising—no iterative refinement is involved.
- The model will produce its predicted denoised images in a single forward pass.
- Transfer the model’s denoised output to the CPU and convert it to NumPy arrays.
- This step is necessary for visualization with
matplotlib, which operates on NumPy arrays.
- This step is necessary for visualization with
- Visualize the results in a plot, displaying:
- Top row: Original clean test images (ground truth).
- Middle row: Noisy test images (input to Model 1).
- Bottom row: Denoised images (Model 1 output).
- Top row: Original clean test images (ground truth).
By analyzing this plot, we can visually assess how effectively Model 1 denoises MNIST digits using its direct image prediction strategy and how well it generalizes to new noisy test data.
The PyTorch code for this inference and visualization process is provided in the subsequent code block.
# --- Inference with Model 1 and Visualization ---
# --- Prepare test dataset and dataloader ---
test_dataset = load_dataset("mnist", split="test") # Load MNIST test split dataset
test_dataset.set_transform(transform) # Apply preprocessing transform to test dataset
test_dataloader = DataLoader(test_dataset, batch_size=8, shuffle=True) # Create DataLoader for test dataset
# --- Get a batch of test images ---
batch = next(iter(test_dataloader))
clean_images = batch["images"].to(device) # Load clean test images to the device
# --- Generate new random noise for inference ---
noise = torch.rand_like(clean_images).to(device) # Generate random noise tensor
noise_amount = torch.randn(clean_images.shape[0]).to(device) # Generate noise amount tensor
noisy_images = corrupt(clean_images, noise, noise_amount) # Create noisy test images by corruption
# --- Perform inference (get denoised images from Model 1) ---
model.eval() # Set model to evaluation mode for inference
with torch.no_grad(): # Disable gradient calculation during inference
denoised_images = model(noisy_images) # Get denoised images from model
# --- Move tensors to CPU and convert to NumPy for visualization ---
noisy_images_np = noisy_images.cpu().numpy() # Move noisy images to CPU and convert to NumPy
denoised_images_np = denoised_images.cpu().numpy() # Move denoised images to CPU and convert to NumPy
clean_images_np = clean_images.cpu().numpy() # Move clean images to CPU and convert to NumPy
# --- Plotting the results: Original, Noisy, Denoised ---
num_images = 6 # Set number of images to visualize
plt.figure(figsize=(12, 6)) # Initialize matplotlib figure for plotting
for i in range(num_images): # Loop through number of images to plot
# --- Plot Original (Clean) Images ---
plt.subplot(3, num_images, i + 1) # Create subplot for original images (top row)
plt.imshow(clean_images_np[i].squeeze(), cmap='Greys') # Display original clean image
plt.title("Original") # Set title for original image subplot
plt.axis('off') # Hide axes for cleaner image display
# --- Plot Noisy Images ---
plt.subplot(3, num_images, i + num_images + 1) # Create subplot for noisy images (middle row)
plt.imshow(noisy_images_np[i].squeeze(), cmap='Greys') # Display noisy image input
plt.title("Noisy") # Set title for noisy image subplot
plt.axis('off') # Hide axes
# --- Plot Denoised Images ---
plt.subplot(3, num_images, i + 2 * num_images + 1) # Create subplot for denoised images (bottom row)
plt.imshow(denoised_images_np[i].squeeze(), cmap='Greys') # Display denoised output image
plt.title("Denoised") # Set title for denoised image subplot
plt.axis('off') # Hide axes
plt.tight_layout() # Adjust subplot layout for better spacing
plt.show() # Show the complete plot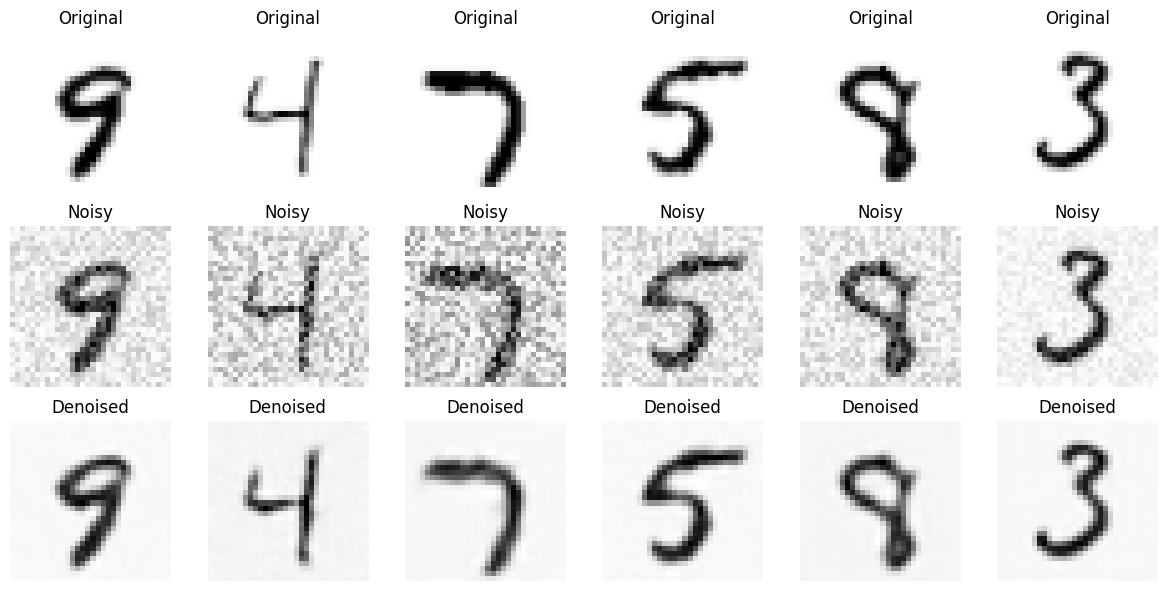
Results and Discussion
Let’s analyze our initial one-shot denoising results to evaluate the baseline performance of our Simple Convolutional UNet.
In the “Denoised” row (bottom row), you should notice that the digits are indeed visibly denoised compared to the “Noisy” row (middle row). The random noise has been reduced, and the digits appear less blurred, indicating that our basic Convolutional UNet has learned to remove some noise through its direct image prediction strategy.
However, when comparing the “Denoised” row to the “Original” row (top row, showing clean digits), it becomes clear that the denoised digits are not perfectly restored. Some residual blurriness remains, and they lack the crispness and sharpness of the original images. Despite these imperfections, the denoised outputs remain recognizable as MNIST digits, showing that the model has captured key visual features.
Let’s run inference one more time, but with a different approach.
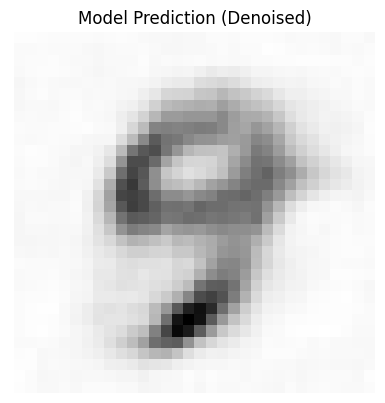
Instead of starting with an original MNIST digit and adding noise to it, we will feed the model pure noise as input and observe the results.
import torch
import matplotlib.pyplot as plt
# Generate a noisy image (random noise)
noise_image = torch.rand(1, 32, 32) # Example: Single-channel (grayscale) 32x32 noise image
# Assume `model` is trained and available
with torch.no_grad():
denoised_image = model(noise_image.unsqueeze(0).to(device)) # Add batch dimension & move to device
denoised_image = denoised_image.squeeze(0).cpu().detach() # Remove batch dim & move to CPU
# Plot both images side by side
fig, axs = plt.subplots(1, 2, figsize=(8, 4))
axs[0].imshow(noise_image.squeeze(), cmap="Greys")
axs[0].set_title("Noisy Image")
axs[0].axis("off")
axs[1].imshow(denoised_image.squeeze(), cmap="Greys")
axs[1].set_title("Model Prediction (Denoised)")
axs[1].axis("off")
plt.tight_layout()
plt.show()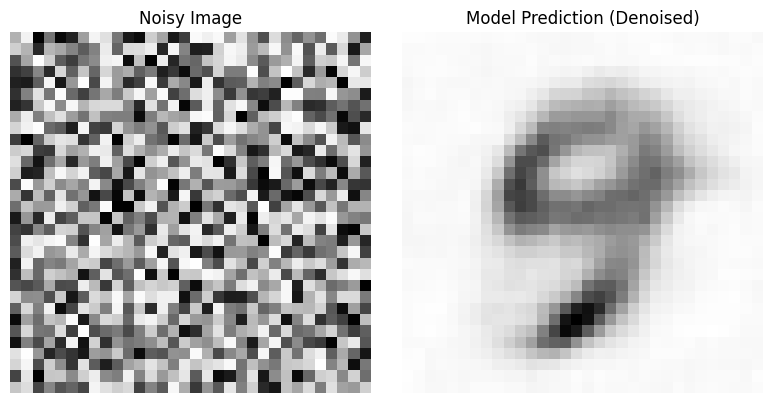
This time, the model struggled to generate a clear, crisp image from pure noise. While it did attempt to predict a digit, the result remains blurry.
In some of my other runs, the outputs were even worse, indicating that the model has difficulty denoising pure noise in a single step. This suggests that one-shot denoising may not be sufficient for fully reconstructing meaningful digits from random noise.
Exploring Iterative Refinement
To see if we can further improve upon these one-shot results, we will experiment with a simple iterative refinement approach. Instead of denoising in a single step, we start with pure random noise and iteratively refine it over 5 steps using our trained model. The following code implements this process:
# --- Iterative Refinement Experiment (Model 1) ---
import torchvision
import matplotlib.pyplot as plt
n_steps = 5
x = torch.rand(8, 1, 32, 32).to(device) # Start from pure random noise
step_history = [x.detach().cpu()] # Store initial noise
pred_output_history = [] # Store model predictions at each step
for i in range(n_steps):
with torch.no_grad():
pred = model(x) # Get model's direct prediction
pred_output_history.append(pred.detach().cpu()) # Store prediction
mix_factor = 1 / (n_steps - i) # Increasing mix factor over steps
x = x * (1 - mix_factor) + pred * mix_factor # Linear blend: refine x with prediction
step_history.append(x.detach().cpu()) # Store refined x
fig, axs = plt.subplots(n_steps, 2, figsize=(9, 4), sharex=True) # Create 2-column plot
axs[0, 0].set_title("x (model input)") # Title for 'input' column
axs[0, 1].set_title("model prediction") # Title for 'prediction' column
for i in range(n_steps): # Loop to plot each step
axs[i, 0].imshow(torchvision.utils.make_grid(step_history[i])[0].clip(0, 1), cmap="Greys") # Plot refined x
axs[i, 1].imshow(torchvision.utils.make_grid(pred_output_history[i])[0].clip(0, 1), cmap="Greys") # Plot prediction
plt.tight_layout()
plt.show()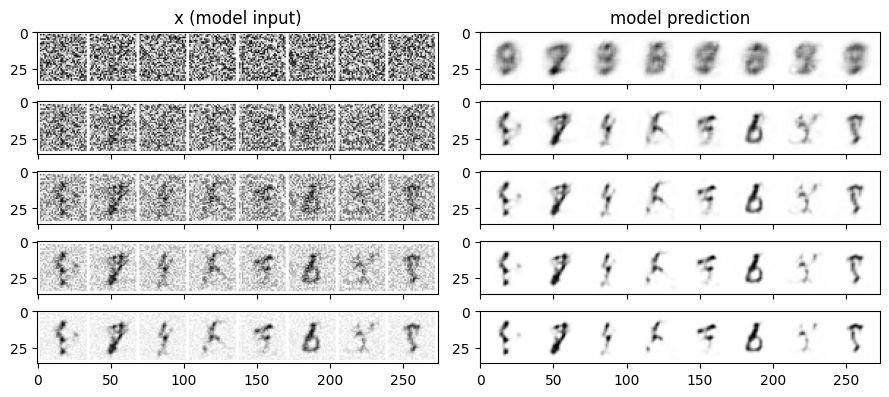
Running this iterative refinement code generates a new plot with two columns:
- Left column (“x (model input)”) Shows images at each step of the refinement process. Starting from pure noise (top row), you can observe how the images gradually become more digit-like over the 5 steps.
- Right column (“model prediction”) Displays the direct predictions of Model 1 at each step.
Comparing the final results to the one-shot “Denoised” image from the previous experiment, you may notice a subtle but visible improvement in image quality. The iteratively refined digits often appear slightly sharper and more well-formed compared to the one-shot denoised outputs.
This suggests that even with a direct prediction model, a basic iterative refinement approach can enhance image quality. However, it’s important to note that this process is still a simplification—it does not represent true diffusion model sampling. The model is still making direct predictions, and we are manually blending them to guide the image toward a cleaner state.
Key Takeaways & Next Steps
From both one-shot denoising and iterative refinement, we can conclude that even a basic Convolutional UNet trained for direct image prediction can perform some level of denoising on MNIST digits. However, to achieve higher-quality, sharper, and more faithfully reconstructed digits, we need to go beyond this basic approach.
In the next section post, we will enhance our UNet architecture using the diffusers library while still employing direct image prediction. This will allow us to examine how architectural improvements can further boost performance. Eventually, we will transition to true noise prediction and scheduled denoising, bringing us closer to the core principles of diffusion models.